Leichte Kleinstantriebe mit hohem DrehmomentRobotergestützte OPs mit Fingerspitzengefühl
Miniaturisierte Endoskopie-Roboter erlauben heute patientenschonende Operationen im Körperinneren ohne große Hautschnitte und selbst an unzugänglichen Stellen. Vielen Chirurgen genügt es allerdings nicht, das Operationsfeld nur durch eine Kamera zu sehen und den Roboter fernzusteuern, sondern sie möchten auch „fühlen“, was sie und der Roboter dabei machen. Zu diesem Zweck hat Master-Student Florian Klug am Institut für Elektromechanische Konstruktionen der Technischen Universität Darmstadt ein Force-Feedback-Nutzerinterface entwickelt, das als Schnittstelle zwischen der Hand des Operateurs und dem Endoskopie-Roboter dient. Leichte, drehmomentstarke Kleinstantriebe übernehmen hierbei eine zentrale Rolle.
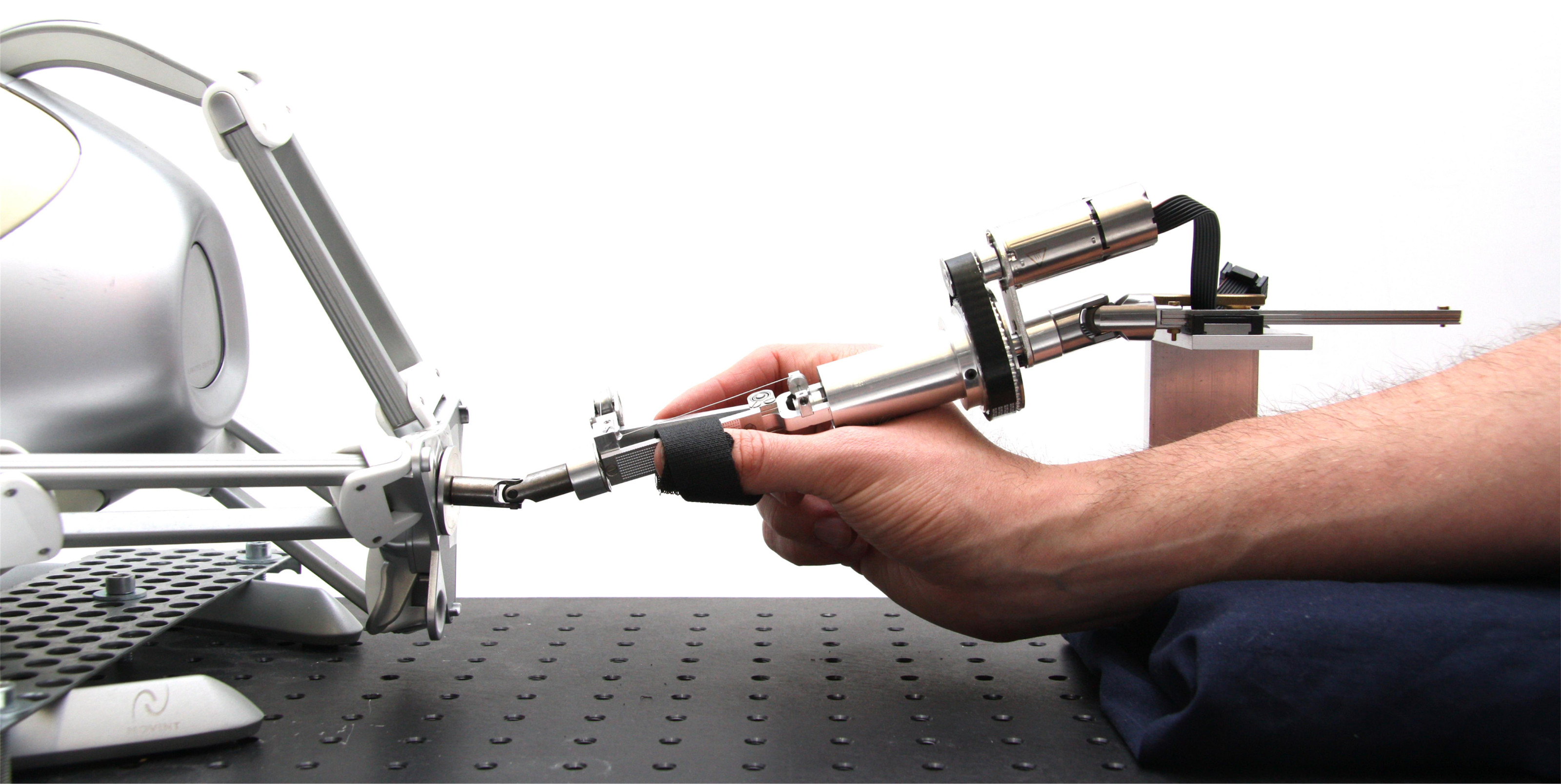
Das Force-Feedback-Interface ist eine Handsteuerung, die im Prinzip ähnlich arbeitet wie ein Joystick. Zusätzlich gibt es aber auch eine mechanische Rückmeldung, was das gesteuerte Instrument, in diesem Fall der Endoskopie-Roboter, tatsächlich macht. Er kann greifen, schneiden, nähen – also alles das, was der Chirurg auch mit herkömmlichen Instrumenten oder einem mechanischen Endoskop macht. Seine Miniatur-Instrumente werden durch das Nutzerinterface auf beliebige Distanz ferngesteuert, wobei das Interface dem Operateur das Gefühl vermittelt, selbst die Instrumente zu führen.
Pinzette mit zwei Freiheitsgraden
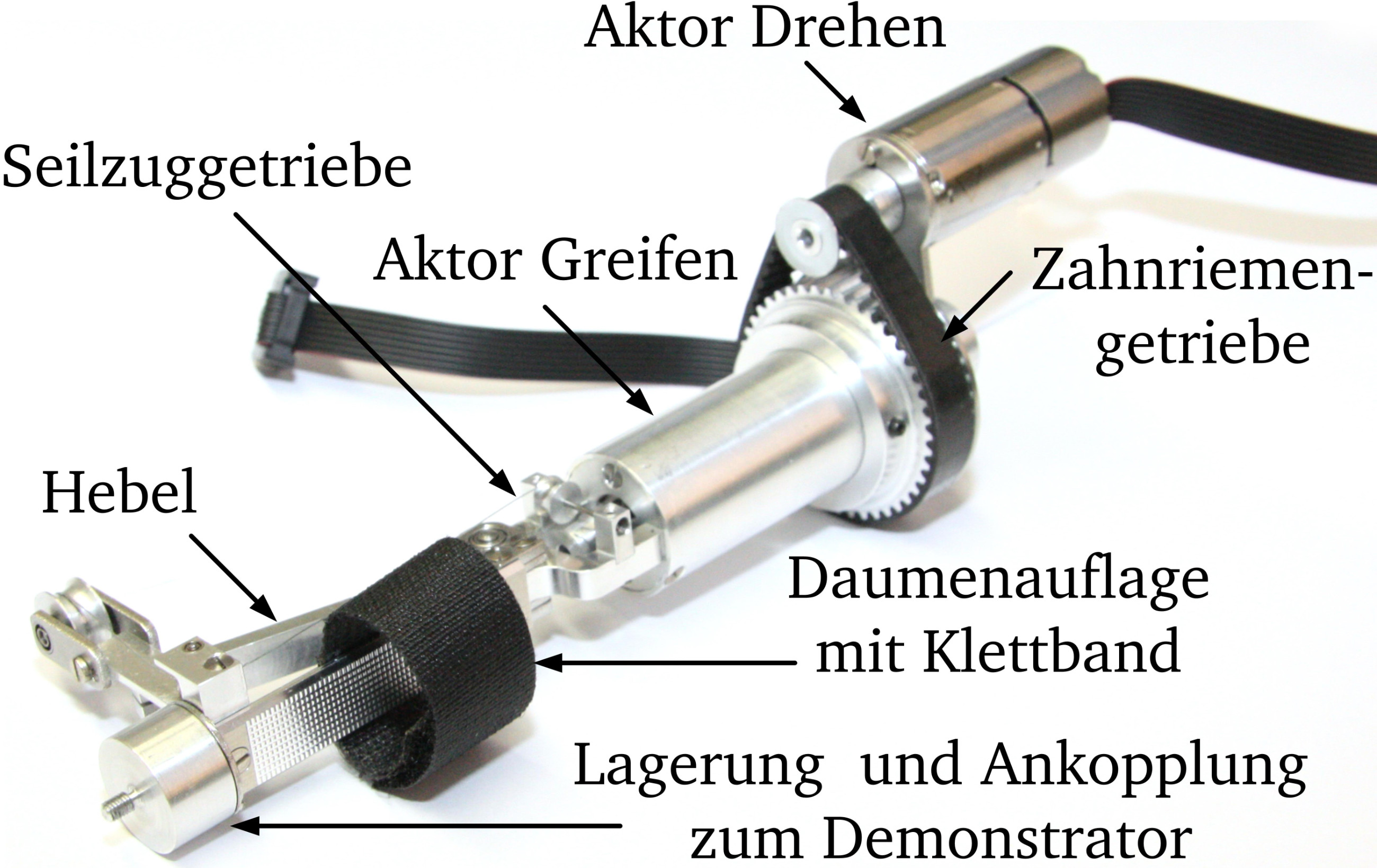
Im Prinzip ist das Nutzer-Interface wie eine Pinzette aufgebaut mit zwei Freiheitsgraden zum Greifen und Drehen und wird mit Daumen, Zeige- und Mittelfinger gesteuert. Daumen und Mittelfinger greifen die Pinzette; der Zeigefinger bewegt einen Hebel, der mittels eines Seilzuggetriebes mit der Welle eines Elektromotors gekoppelt ist. Ein weiterer Motor ist für die Drehbewegung zuständig.
Als Antriebe sind in beiden Fällen bürstenlose Gleichstrommotoren von FAULHABER mit hochauflösenden Encodern eingesetzt. In Kombination mit den leistungsstarken, bürstenlosen 4-Pol DC-Servomotoren ermöglichen diese eine exakte Kommutierung und eine optimale Positions- und Drehzahlregelung. Die absolute Winkelinformation ist bereits beim Einschalten ohne Referenzfahrt vorhanden, eine wichtige Eigenschaft auch für viele andere Positionieranwendungen. Für Motor und Encoder genügt zudem ein Ausgangskabel. Diese sparsame Verkabelung kommt dem Einsatz innerhalb des filigranen Nutzerinterfaces natürlich sehr gelegen.

Die Auswertung der Encodersignale und die Ansteuerung des Roboters übernimmt ein auf die DC-Servomotoren abgestimmter Motion Controller. Der benutzerfreundliche Einachs-Positionierregler eignet sich für alle Anwendungen, die eine hohe Auflösung beim Positionieren und eine sehr präzise Drehzahlregelung erfordern. Die Elektronik muss neben der Ansteuerung der Motoren auch die Stromregelung übernehmen, damit genau definierte Drehmomente stufenlos ausgegeben werden können. Über eine RS232-Schnittstelle wird die Elektronik dazu mit der Software „Motion Manager“ programmiert und ausgelesen. Bei Bedarf kann die Elektronik aber auch über CANopen kommunizieren.
Das richtige Feeling
Wie der Ablauf für den Chirurgen in der Praxis funktioniert, ist einfach zu verstehen. Soll beispielsweise mit einer Pinzette ein Stück Gewebe gegriffen werden, registriert der Encoder im Nutzerinterface in Echtzeit die Position und Bewegung des Fingers und damit das Öffnen oder Schließen der Pinzette. Dabei wird der Greifabstand von Daumen und Zeigefinger mit einer Genauigkeit von 0,004 mm bestimmt. Der Motion Controller errechnet daraus die Sollposition und gibt sie an den Roboter weiter, der seinen Greifer entsprechend bewegt. Zugleich wird in dem Greifer die Kraft gemessen, die zwischen Gewebe und Greifer herrscht. Diese Kraft überträgt der Motor im Nutzerinterface wieder zum Finger des Chirurgen. Wenn der Roboter also etwas greift und dabei auf einen Widerstand trifft, dann übt der Motor einen entsprechenden Widerstand gegen den Finger aus. So kann der Chirurg unmittelbar spüren, was im Operationsgebiet passiert.
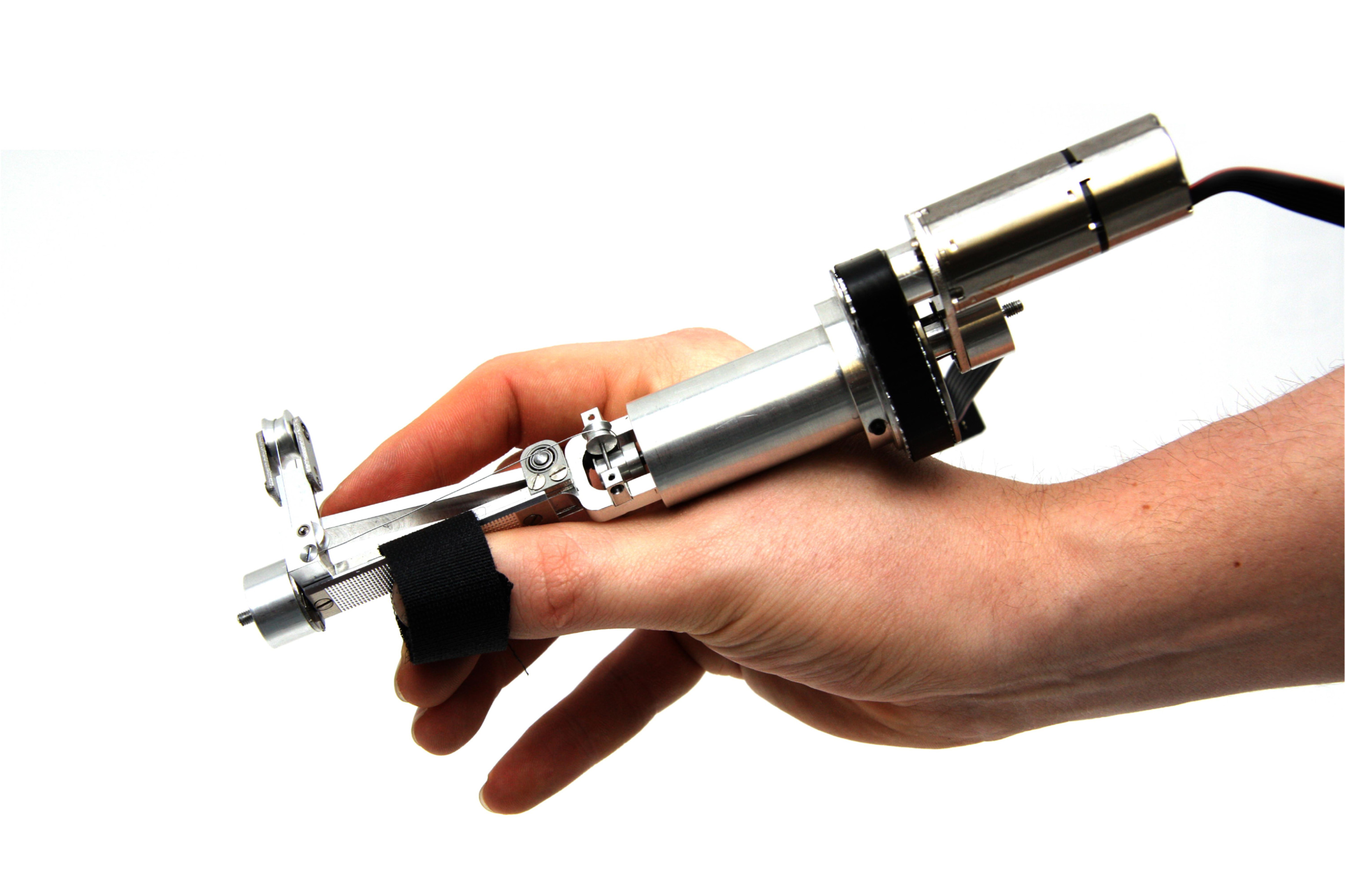
Die bürstenlosen Gleichstrommotoren erzeugen dazu relativ hohe Drehmomente bei minimalem Eigengewicht. Da der Chirurg das Nutzerinterface während der Operation durchaus mehrere Stunden in der Hand hält, ist dieser Leichtbau ideal. Das gesamte Interface bringt – nicht zuletzt dank der nur je 70 g schweren Motoren – lediglich 257 g auf die Waage.
Stahlseil für mehr Gefühl.

Beim Pinzettengriff wird die Bewegung des Chirurgen mit einem Seilzuggetriebe übertragen, da Vorversuche zeigten, dass ein Stahlseil vom sinnlichen Eindruck her die beste Kraftübertragung gewährleistet. Aufgrund der Übersetzung wird eine statische Greifkraft von bis zu 6,3 N entgegen der Greifrichtung ausgegeben. Bei dem bürstenlosen Gleichstrommotor, der für die Drehbewegung als Momentenquelle dient, sorgt ein angekoppeltes Zahnriemengetriebe für die gewünschte Übersetzung. Der Drehwinkel wird im Bereich von 0 bis 180 Grad von dem im Motor eingebauten Absolut-Encoder mit einer Auflösung von 0,02 Grad gemessen.
Dank der elektronisch gesteuerten Kraftübertragung und der Übersetzung kann der Chirurg sogar feiner arbeiten, als es mit der freien Hand möglich wäre. So wird er in die Lage versetzt, auch kleinste Schnitte mit der größtmöglichen Präzision in anatomisch schwer zugänglichen Regionen auszuführen. Die bürstenlosen Servomotoren tragen damit wesentlich dazu bei, dass die Chirurgie heute immer patientenschonender wird. Gesundheitsrisiken lassen sich minimieren und die Verweildauer im Krankenhaus sinkt.
Alle Bilder: Faulhaber / Florian Klug