Roboterprogrammierung neu gedacht Online- und Offline-Programmierung perfekt verzahnt
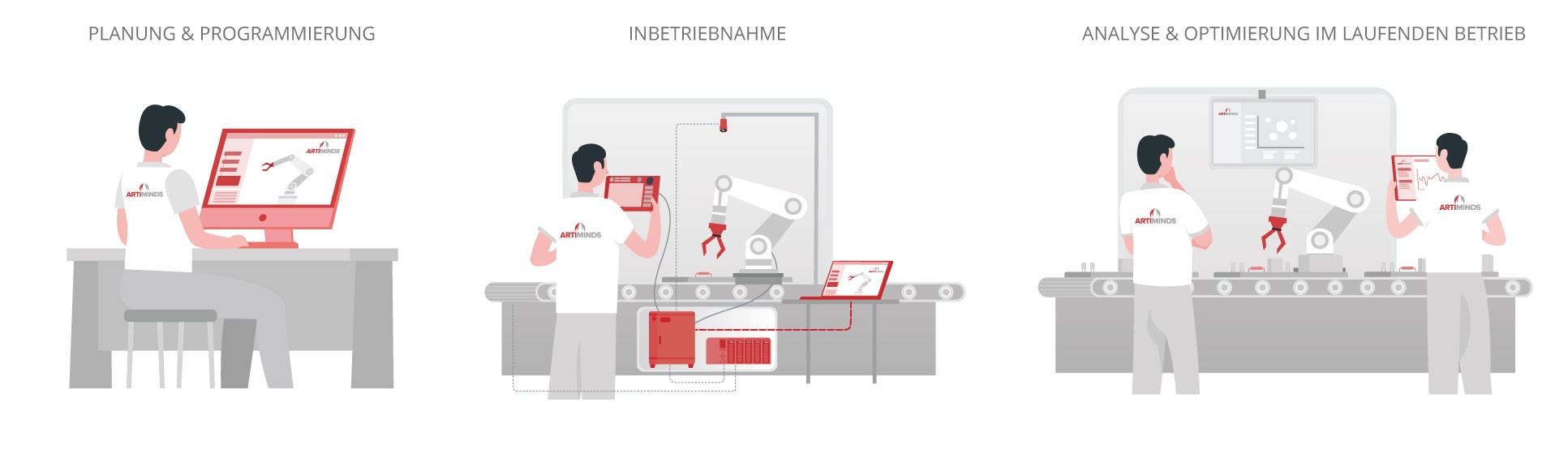
Komplexe Roboteranwendungen durchlaufen in ihrem Lebenszyklus in der Regel drei Phasen: Planung, Programmierung und Instandhaltung. Nicht selten kommt es an den Schnittstellen zwischen den einzelnen Phasen zu Problemen. Einerseits weil verschiedene Personen zuständig sind, andererseits weil unterschiedliche Tools genutzt werden. Eine Programmierlösung, die sich in allen drei Phasen und über die verschiedenen Aufgabenbereiche hinweg einsetzen lässt, bringt hier zahlreiche Vorteile. Insbesondere auch dann, wenn Anwender flexibel zwischen Online- und Offline-Programmierung hin und her schalten können. Wir erklären warum.
Unter Offline-Programmierung versteht man das Programmieren eines Roboters in der Simulationsumgebung, während bei der Online-Programmierung direkt am realen Roboter programmiert bzw. getestet werden kann. Typischerweise verlaufen Roboter-Automatisierungsprojekte in drei Schritten, die spezielle Online- oder Offline-Arbeiten beinhalten: Planung, Programmierung und Optimierungen während der Instandhaltung. Jede Phase erfordert spezielle Tools, individuelles Know-how und eine gute Abstimmung, da häufig unterschiedliche Personen (Rollen) für die Bereiche zuständig sind.
Stand der Technik
Zu Beginn gibt es naturgemäß noch keinen realen Roboter, auf dem programmiert und getestet werden kann. Der Planer ist daher auf Simulationswerkzeuge angewiesen, um die geometrische Auslegung der Roboterzelle, die Werkzeuge sowie die Programmabläufe offline festzulegen und zu überprüfen. Hierzu führt er Erreichbarkeitsanalysen und Kollisionsüberprüfungen durch, optimiert die Reihenfolge der Roboteraktionen, bestimmt möglichst effiziente Bewegungsbahnen und legt Sicherheitsbereiche fest.
In der nächsten Phase hat der Programmierer die schwierige Aufgabe, das Ergebnis der Planung, das oftmals nur abstrakt in Form von CAD-Daten, Bildern und Ablaufbeschreibungen vorliegt, in ein komplexes Roboterprogramm umzusetzen und in der Planung fehlende oder fehlerhafte Annahmen zu korrigieren. Um den geplanten Prozess in die Realität umzusetzen, Roboterbewegungen flexibel zu berechnen, mit der SPS zu kommunizieren, Werkzeuge und Bildverarbeitungssysteme anzusteuern oder komplexe Sensoren wie Kraft-Momenten-Sensoren einzubinden, muss er herstellerspezifischen Robotercode schreiben. Sind unterschiedliche Hersteller im Einsatz, führt dies unweigerlich zu höherem Aufwand.
Sobald die Anwendung in der Produktion läuft, wird vom Instandhaltungs-Team erwartet, dass es nicht nur eines, sondern mehrere komplexe Roboterprogramme für unterschiedliche Roboterhersteller schnell (online) korrigieren und verbessern kann sowie Änderungen aufgrund des Schichtbetriebs nachvollziehbar dokumentiert. Hierfür muss der Programmierer das komplexe Roboterprogramm in Form von Dokumentation, Kommentaren und Eingabemasken bestmöglich vorbereiten, damit das in Robotercode formulierte Prozesswissen möglichst nicht verloren geht.
Ein neuer Ansatz
Die Spezialisten für Robotik-Programmierung von ArtiMinds kennen die Probleme, die diese drei Entwicklungsphasen mit sich bringen gut und haben daher mit der Software Robot Programming Suite (RPS) einen neuen durchgängigen Ansatz entwickelt, der die Online- und Offline-Programmierung nahtlos miteinander kombiniert. So muss für alle Phasen der robotergestützten Automatisierung nur ein Produkt eingesetzt werden. Das Schöne an dem Ansatz ist: er ist einfach in die bestehenden Abläufe zu integrieren, da die Software automatisch Robotercode erstellt, der auf der Standardsteuerung des Roboterherstellers läuft. Daher fallen zum einen die Schnittstellenprobleme zwischen verschiedenen Tools weg. Zum anderen können Rollen auch stärker verschmelzen. Das erlaubt eine flexiblere Nutzung von Ressourcen und steigert die Effizienz der Zusammenarbeit zwischen den einzelnen Bereichen.

So entstehen beispielsweise in der Planungsphase bei gleichem Aufwand wie zuvor realitätsnähere Ergebnisse. Der Roboterprogrammierer kann diese dann mit deutlich weniger Aufwand umsetzen. Das Risiko, dass kritische Probleme erst in der Programmierphase bzw. bei der Inbetriebnahme auftreten, wird erheblich kleiner. Auf Basis der Datendurchgängigkeit und eines eigenen Applikationskatalogs kann man sich zudem leicht roboterübergreifende Standards erarbeiten. „Außergewöhnlich bei unserem Konzept ist, dass man damit nicht nur spezielle Teillösungen, sondern komplexe Roboter-Automatisierungsprojekte in ihrer Gesamtheit realisieren kann. Und das mit den Robotern aller namhafter Hersteller“, erklärt Dr.-Ing. Andreas Hermann, Senior Team Leader Advanced Robotics bei ArtiMinds.
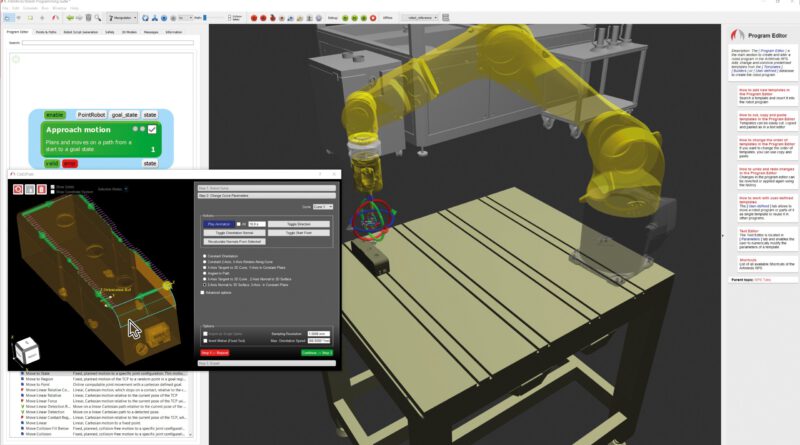
Schnell verschiedene Lösungen testen
Durch die einfache Möglichkeit zum Wechsel zwischen online und offline bringt die Software weitere Vorteile. Diese zeigen sich u.a. bei der Programmierung. Ein Beispiel macht das deutlich: Beim Entgraten von Bauteilen oder bei der Inspektion von Kanten müssen Roboter oft komplexe Trajektorien abfahren. Diese bewegungsorientiert zu programmieren und mit dem realen Werkstück abzugleichen ist alles andere als trivial. Hier geht ArtiMinds mit ihrer RPS einen anderen Weg. Mit dem Tool CAD2Path können in der Offline-Welt CAD-Daten des Bauteils eingelesen und daraus automatisiert Bewegungsbahnen aus dem Modell erzeugt werden. Für den Abgleich mit der realen Welt wechselt der Programmierer dann in den Online-Modus, bewegt den Roboterarm an einige charakteristische Punkte des Werkstücks und teacht diese ein. Positionen vom digitalen Zwilling können auf den realen Roboter übertragen werden oder umgekehrt. Innerhalb kürzester Zeit lassen sich so komplexe Pfade programmieren. Auch Transferbewegungen, bei denen es nicht auf Genauigkeit ankommt, können offline oft einfacher definiert und bei Bedarf dann online um ihre exakte Zielposition ergänzt werden.
Durch die Möglichkeit zum einfachen Umschalten zwischen beiden Welten lassen sich verschiedene Lösungsansätze schnell direkt auf dem Roboter evaluieren, da Teachen, Programmieren und Testen in einer engen Verbindung stehen. Das ist gerade bei herausfordernderen Anwendungen, die aufgrund der Komplexität bei der Programmierung häufiger getestet werden müssen, von immensem Vorteil. Ein Beispiel sind sensorbasierte Anwendungen mit Kraft-Momenten-Sensoren oder Kamerasystemen, die einen deutlich höheren Programmieraufwand und mehr Know-how erfordern als einfache Bewegungen. Hermann ergänzt: „Programmierer können die Technik quasi „weg-abstrahieren“ und sich rein auf die Prozesse konzentrieren. Das macht die RPS auch zum idealen Tool für Rapid Prototyping von sensorbasierten Montageaufgaben. Die Entwicklungszyklen aus Programmieren, Nachteachen, Code erzeugen und Testen werden kürzer und unterschiedliche Lösungsstrategien lassen sich effizient evaluieren.“
Zudem wird der Einsatz von elektrischen Greifern, Bildverarbeitungslösungen oder Kraft-Momenten-Sensoren deutlich vereinfacht und der Anwender bleibt beim Set-Up flexibel. Auch bei Komponenten mit nur einfachen Funktionen ist der Initialaufwand für die Einbindung in der Regel immens, weil zahlreiche Protokolle implementiert und Treiber erstellt werden müssen. Hier unterstützt die Programmiersuite durch ein umfangreiches Sortiment an Protokollen, wodurch dieser Aufwand entfällt.
Vorteile für die Instandhaltung
Schließlich ist die nahtlose Kombination aus Online- und Offline-Programmierung auch für die Instandhaltung von Vorteil und die RPS erleichtert den Austausch mit den Programmierern. Hermann ergänzt: „Ziel unserer aktuellen Entwicklungen ist es, den „disconnected“ Modus immer weiter auszubauen, d.h. selbst ohne RPS kann der Instandhalter im erstellten Robotercode mit den Standardtechniken des Roboterherstellers gezielt Änderungen, wie z.B. das Nachteachen eines Wegpunkts, vornehmen.“ Einzelne geteachte Positionen beispielsweise kann der Instandhalter nun mit wenig Aufwand nachträglich durch Touch-Up verbessern und die Aktualisierungen in die Software zurückspielen. Das ist sehr wichtig, weil sonst Dokumentation und Realität nicht mehr übereinstimmen und bei der Realisierung weiterer Anlagen essentielle Änderungen verloren gehen. Mit der Zusatzsoftware LAR (Learning & Analytics for Robots) ist es zudem möglich, Roboterdaten aus dem realen Betrieb zu analysieren. Damit lassen sich Produktionszyklen in Bezug auf Stabilität, Genauigkeit und Geschwindigkeit optimieren. Gleichzeitig ist es mit der LAR möglich, verschiedene Programmstände miteinander zu vergleichen. So bleiben Änderungen transparent. Außerdem lässt sich sicher sagen, ob beispielsweise eine nachträgliche „Optimierung“ wirklich besser ist als die ursprüngliche Version. Zudem profitiert der Instandhalter von einer PDF-Dokumentation inklusive hinterlegter Kommentare, die der Programmierer einfach per Knopfdruck aus der Programmiersuite erstellen kann.
Schluss mit Einbahnstraße
Nicht nur für Neueinsteiger ist die Programmiersuite interessant. Auch für Unternehmen, die bereits über eine Bibliothek aus Robotercode verfügen und diese weiterverwenden wollen, bietet sie verschiedene Lösungsansätze. Einerseits kann Code aus vorherigen Anwendungen integriert und für zukünftige Projekte weiterverwendet werden. Andererseits ist auch der umgekehrte Weg denkbar. Z.B. für komplexe sensorbasierte Teilaktionen kann Code mit der Programmiersuite erzeugt und in der Programmierumgebung des Roboters eingebunden werden. Generell ist den Roboterexperten in diesem Zusammenhang seit jeher wichtig, dass sie den Anwendern keine Vorgaben machen, wie sie den Code nutzen und dass ein schrittweiser Umstieg möglich ist. Hermann resümiert: „Die kombinierte Herangehensweise aus Online- und Offline-Programmierung im Zusammenspiel mit den vorhandenen Regelungsalgorithmen und der Treiberbibliothek erlauben es, prozessorientiert zu arbeiten und diesen Fokus nicht durch zeitaufwändige Detailimplementierungen zu verlieren.“