Vom Maschinenbau bis zum TeilchenbeschleunigerHexapoden und ihre Anwendungsgebiete
Viele Bereiche der Automatisierungstechnik verlangen heute nach möglichst präzisen Positioniersystemen. Wenn mehrachsige Lösungen erforderlich sind, bieten sich in vielen Fällen parallelkinematische Systeme an. Ein Beispiel hierfür sind sogenannte Hexapoden, die es heute mit Stellwegen bis zu einigen Hundert Millimetern gibt und die selbst große Lasten auf den Mikrometer genau positionieren können. Die Vorteile gegenüber seriellen, also gestapelten Systemen, sind vor allem die deutlich bessere Bahntreue, Wiederholgenauigkeit und Ablaufebenheit, die geringere bewegte Masse und damit eine höhere und für alle Bewegungsachsen gleiche Dynamik, kein Kabelmanagement und ein deutlich kompakterer Aufbau. Diese Eigenschaften lassen sich in den unterschiedlichsten Anwendungen nutzen. Die Palette reicht von Maschinenbau und Robotik bis zu Medizintechnik und Forschung, wie die im Folgenden beschriebenen Anwendungen zeigen.
Im Produktprogramm der Karlsruher Firma Physik Instrumente (PI) finden sich leistungsfähige sechsachsige parallelkinematische Systeme in einer Vielzahl unterschiedlicher Ausführungen, die sich für unterschiedliche Lasten eignen, mit unterschiedlichen Antriebsarten angeboten werden, für die verschiedensten Umgebungsbedingungen ausgelegt sind und bei Bedarf mittlerweile auch direkt mit übergeordneten Steuerungen kommunizieren können.
Im Automatisierungsverbund mit oder ohne SPS

Bild: PI
Durch die direkte Anbindungsmöglichkeit an die Steuerung lassen sich die Hexapoden im Maschinen- und Anlagenbau beispielsweise praktisch in jeden Automatisierungsverbund integrieren und die Taktsynchronisierung mit anderen Automatisierungskomponenten ist gut realisierbar, z.B. bei automatischen Zuführungen etc. In der Automatisierungstechnik erschließen sich den Hexapod-Systemen dadurch zahlreiche Anwendungsbereiche, angefangen von spanenden Bearbeitungen bis hin zu komplexen Justageprozessen. Selbst vor widrigen Umgebungsbedingungen lassen sich die Hexapoden dabei gut schützen, z.B. mit einem Faltenbalg. Dann trotzen sie selbst den harten Umgebungsbedingungen in automatischen Bearbeitungszellen, wo meist unter Kühlmitteleinsatz zerspant wird.
Die SPS oder CNC kann in solchen Applikationen mit dem Hexapod-System dann über eine standardisierte Realtime-Ethernet-Schnittstelle kommunizieren. Sie gibt als Master die kartesische Soll-Position bzw. Bahnen im Raum vor und bekommt die Ist-Positionen ebenfalls über die Feldbusschnittstelle zurückgemeldet. Alle anderen Berechnungen, die notwendig sind, um die Fahrbefehle für das parallelkinematische Sechsachssystem umzusetzen, übernimmt der Hexapodcontroller, also die Transformation der kartesischen Soll-Positionen in die Ansteuerung der Einzelantriebe. Der Controller verhält sich in diesem Fall wie ein intelligenter Antrieb.
Anpassungsfähig und flexibel

Bild: PI
Natürlich kann auch der Hexapodcontroller statt der übergeordneten Steuerung die Positionsregelung übernehmen. Dann wird allerdings von der SPS nur ein Positionskommando abgesetzt und während des Ablaufs lässt sich die Bewegung nicht mit anderen Antriebsachsen, Messsystemen etc. synchronisieren. Wenn keine übergeordnete SPS vorhanden oder keine Synchronität mit anderen Systemkomponenten notwendig ist, kann der Hexapodcontroller auch durch lineare Interpolation die Trajektorien planen auf Basis von G-Code nach DIN 66025/ISO 6983. Dadurch lässt sich dann mithilfe des Hexapod-Systems Werkstück oder Werkzeug während der Bearbeitung mit großer Präzision nahezu ruckfrei verfahren, ohne dass die Mechanik ins Schwingen kommt.
Die Hexapoden aus Karlsruhe können sehr unterschiedlich aufgebaut sein. Die modulare Konzeption ermöglicht anwendungsspezifische Anpassungen innerhalb kurzer Zeit. Die Beine sind so konstruiert, dass ihre Länge einfach skaliert werden kann. Sie enthalten die erforderliche Elektronik für Referenz- und Endschalter, Positionssensor und – je nach Motor – elektronische Kommutierung. So können sie über standardisierte Gelenke mit nahezu beliebige Geometrien der Grund- und Deckplatte kombiniert werden. Für eine bestimmte Aufgabe die passende Lösung zu finden vereinfacht sich dadurch, da diese Hexapoden auch große Lasten bis zu mehreren Tonnen mit der ihnen eigenen Präzision positionieren und verfahren können.
Bei Messaufbauten präzise mit sechs Freiheitsgraden positionieren
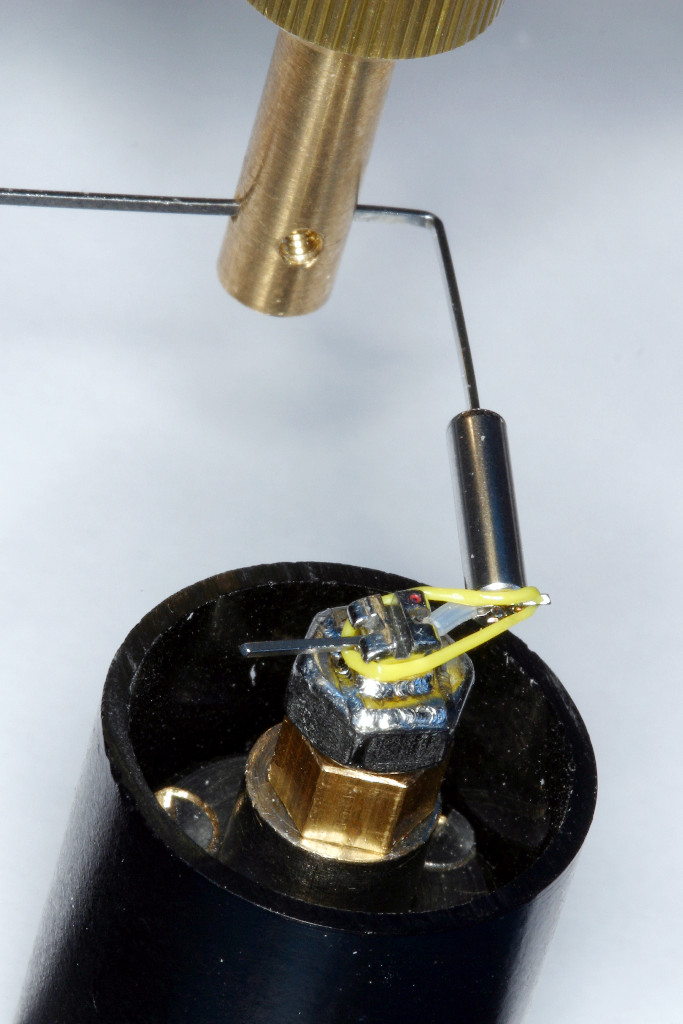
Bild: Universität Ulm
Dabei lassen sich mit Hexapoden auch eher spezielle Aufgabenstellungen lösen. Eine Anwendung aus der medizinischen Forschung liefert dafür ein schönes Beispiel. Hier geht es um einen Messaufbau, mit dessen Hilfe sich die Realitätsnähe kieferorthopädischer FE-Modelle überprüfen und modifizieren lässt: Um die Frage zu beantworten, wie sich der elastisch in den Kieferknochen eingebettete Zahn unter Belastung verhält, haben Wissenschaftler der Universität Ulm eine numerisch gesteuerte Versuchsanordnung entwickelt, die es erlaubt, die klinisch relevanten Kräfte zu messen, die während der Zahnbewegung auf den Zahn wirken.
Der biomechanische Aufbau des Simulationssystems basiert auf einem Hexapoden, der mit 348 mm Durchmesser und 328 mm Höhe sehr kompakt baut. Mit einer Wiederholgenauigkeit von ±1 µm (z-Achse), bzw. ±2 µm (x- und y-Achse) und dank der hohen Steifigkeit des Gesamtsystems erwies er sich als ideale Lösung, um die kleinen Bewegungen eines Zahnes im Kieferknochen zu simulieren. Hinzu kommt die für die biomechanische Simulation notwendige freie Definition des Drehpunkts innerhalb oder außerhalb der Zahnwurzel (Pivot-Punkt). Das standardisierte elastische Verhalten des Zahnhalteapparats wird durch ein eigens hierfür entwickeltes Programm simuliert. Die Kräfte und Momente, welche die zu studierende kieferorthopädische Apparatur erzeugt, wirken über das kieferorthopädische Bracket auf den Phantomzahn und können von den Wissenschaftlern ausgewertet werden.
Probenmanipulation an Sychrotron-Strahlungsquellen
Interessante Anwendungsmöglichkeiten für Hexapoden finden sich auch an Sychrotron-Strahlungsquellen. Bei solchen Beamlines lassen sich Röntgenbeugung und Reflexionen der Synchrotronstrahlung nutzen, um unter Hochvakuumbedingungen im Rahmen moderner Materialforschung die strukturellen Eigenschaften dünner Filme zu untersuchen. Für den direkten Einsatz an einer solchen Beamline hat SURFACE, einer der führenden Hersteller von Pulsed Laser Depositionssystemen, ein All-in-one-System entwickelt, mit dem sich unterschiedliche Untersuchungen durchführen lassen.
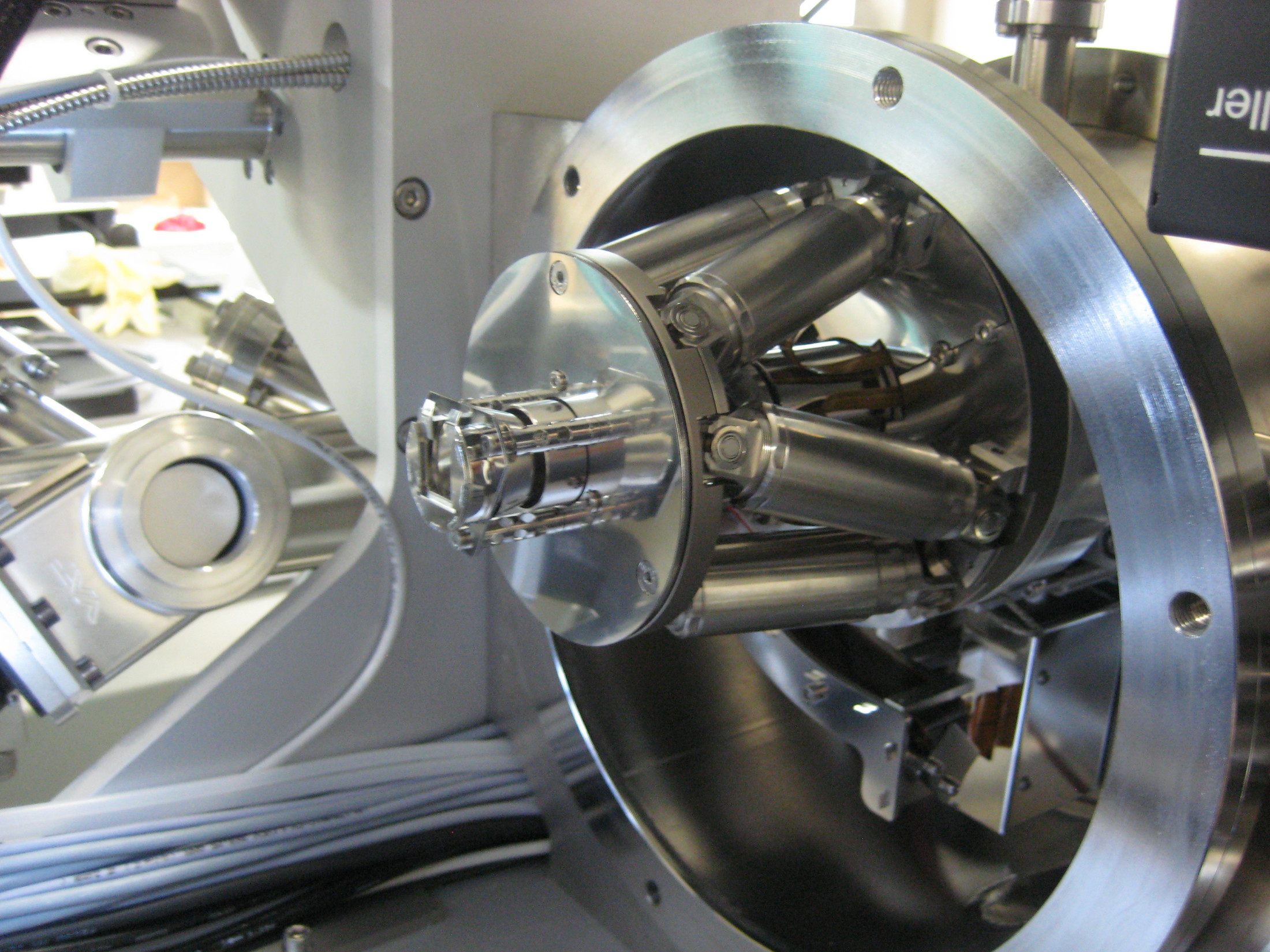
Bild: SURFACE
Der Probenmanipulator hält dazu die 10 x 10 mm² großen Substrate. Und der für den Einsatz im Hochvakuum ausgelegte Hexapod übernimmt dann die Positionierung der Probe in Relation zu den einfallenden Röntgenstrahlen. Die Probe kann so um ±5° mit einer Auflösung von 0,001° um die x- und y-Achse geschwenkt werden. Zum Ausgleich unterschiedlicher Substratdicken lässt sie sich zudem in Richtung der z-Achse, also senkrecht zur Probenoberfläche, um bis zu 3 mm verschieben. Bewegungen von ±6 mm in x- und y-Richtung ermöglichen Scans an verschiedenen Stellen der Probenoberfläche. Der kompakte Hexapod, der bei einem Durchmesser von nur 130 mm lediglich 115 mm hoch ist, wurde auf einem Drehtisch montiert, der im Bedarfsfall weitere Positionieraufgaben übernehmen kann.
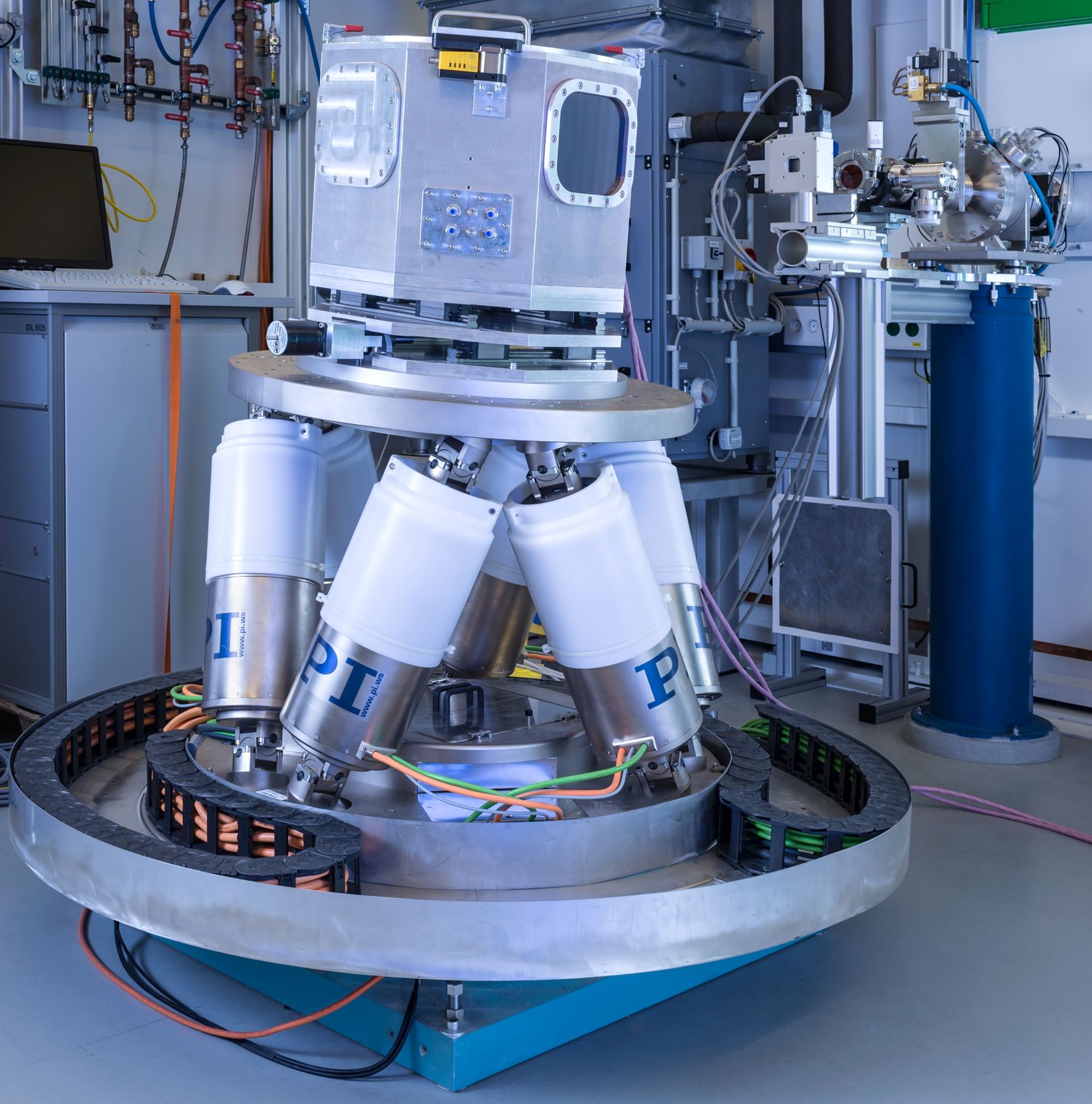
Schwerlast-Hexapod in der Materialforschung
An Synchrotron-Strahlungsquellen werden aber durchaus auch wesentlich größere Hexapoden eingesetzt. Ein Beispiel findet sich in Hamburg. Der Schwerlast-Hexapod wird hier an einer Beamline für die Materialforschung eingesetzt. Als „Herzstück“ einer Experimentierhütte ermöglicht er die Messungen von Materialeigenschaften, die z.B. während Materialumformungen auftreten und dabei Aufschluss über Materialalterung und damit zu erwartenden Standzeiten und Lebensdauer geben. Dabei können Effekte nachgewiesen werden bis hinunter zu Domänen- und Kristallstrukturen. Durch seine große Tragfähigkeit von bis zu einer Tonne kann der Hexapod den vollständigen Aufbau tragen mitsamt der Vorrichtung zum Aufbringen der mechanischen Beanspruchung. Dabei positioniert der Hexapod auch große Massen über Strecken von 400 mm mit einer Genauigkeit von ±1 µm, z.B. ganze Motorblöcke, Turbinenteile, Sinteröfen und Kryokammern sowie Schweißvorrichtungen oder andere Bearbeitungsmaschinen.
Ihre Vielseitigkeit beweisen Hexapoden damit einmal mehr, zumal es noch viele weitere Einsatzbereiche gibt, in denen die präzisen parallelkinematischen Positioniersysteme immer wieder ihre Vorteile zeigen, angefangen von der Automatisierungstechnik und Robotik bis hin zu Weltraumteleskopen oder den beschriebenen Teilchenbeschleunigern.
Titelbild: Physik Instrumente (PI), Helmholtz-Zentrum Geesthacht am DESY, N. Schell