
Simulation und Kompensation von Bewegungen:Hexapoden für dynamische Anwendungen
Kleine Bewegungen haben oft große Wirkung. Schon ein leichtes Zittern der Hand sorgt beispielsweise für unscharfe, „verwackelte“ Kameraaufnahmen; unerwünschte Bewegungen durch Führungsfehler, Bearbeitungsvorgänge etc. können Präzisionsmaschinen in der Fertigung so stören, dass das Ergebnis unbrauchbar wird. Gerade bei ständig steigenden Anforderungen an die Qualität und Leistungsfähigkeit der Produkte gilt es, solche Probleme zu vermeiden. Die Simulation von Bewegungen und deren Kompensation werden hier zu wichtigen Hilfsmitteln. Dynamische Hexapoden spielen als Positioniersysteme dabei eine wichtige Rolle.
Wenn die Anforderungen an die Fertigung und Qualitätssicherung auf Bauteilebene oder beim Endprodukt steigen, kann es in vielen Bereichen sinnvoll sein, Bewegungen zu simulieren. Ein typisches Beispiel hierfür sind Prüfeinrichtungen für Beschleunigungs- oder gyroskopische Sensoren, wie sie beispielsweise in Smartphones, Handys und Kameras eingesetzt sind, um Lageänderungen zu erfassen. Sie werden anhand vorgegebener Bewegungsmuster getestet. Ähnliches gilt für Bildstabilisierungssysteme in Kameras, deren Algorithmen und Mechanik auf Wirksamkeit geprüft werden müssen.
Simulation definierter Bewegungen
Scharfe Bilder auch ohne Stativ zu erhalten und dabei natürlichen und künstlichen Bewegungen entgegenzuwirken, zählt heute bei Kameras zu den entscheidenden Anforderungen. Beschleunigungssensoren messen lineare, gyroskopische Sensoren messen Winkelbeschleunigungen. Sie erfassen also z. B. in Kameras die Zitterbewegungen des Fotografen oder die Vibrationen eines Fahr- oder Flugzeugs, damit das Bildstabilisierungssystem sie automatisch ausgleichen kann. Diese Maßnahmen lassen sich durch die Simulation definierter Bewegungen bzw. Vibrationen testen. Die CIPA (Camera and Imaging Product Association), ein internationaler Zusammenschluss von Kameraherstellern, erarbeitet hierfür ähnlich wie ein DIN-Ausschuss die technischen Standards und hat mit der DC-011-2015 eine neue Norm für die Testbedingungen bei der Bewegungssimulation verabschiedet. Ähnliche Simulationsaufgaben gibt es aber auch in der Medizintechnik. Ein Beispiel ist das Simulieren von Augenbewegungen.
Kompensation definierter Bewegungen
In anderen Bereichen ist man nicht auf die Simulation, sondern die Kompensation definierter Bewegungen angewiesen, um steigenden Qualitätsanforderungen zu genügen. Dazu zählen beispielsweise Führungsfehler an Bearbeitungsmaschinen (Taumeln, Exzentrizität) oder die Kompensation von definierten, aber unerwünschten Eigenbewegungen beim Fertigungsprozess selbst. Ohne eine solche Kompensation könnten Fertigungstoleranzen aus dem Ruder laufen; schlimmstenfalls würde Ausschuss produziert. Auch die Kompensation zufälliger Bewegungen kann in diesem Zusammenhang zum Thema werden. Bewegungen und Stöße durch Trittschall, Lüfter, Kühlsysteme, Motoren, Bearbeitungsvorgänge etc. können z. B. bei der Mikrobearbeitung Muster so verfälschen, dass das Ergebnis unbrauchbar wird. Hier hilft die Schwingungsisolation weiter. Dazu werden die auftretenden Vibrationen erfasst, um die zur Kompensation notwendigen Gegenbewegungen erzeugen zu können.
Was müssen die Bewegungssimulatoren und -kompensatoren leisten?
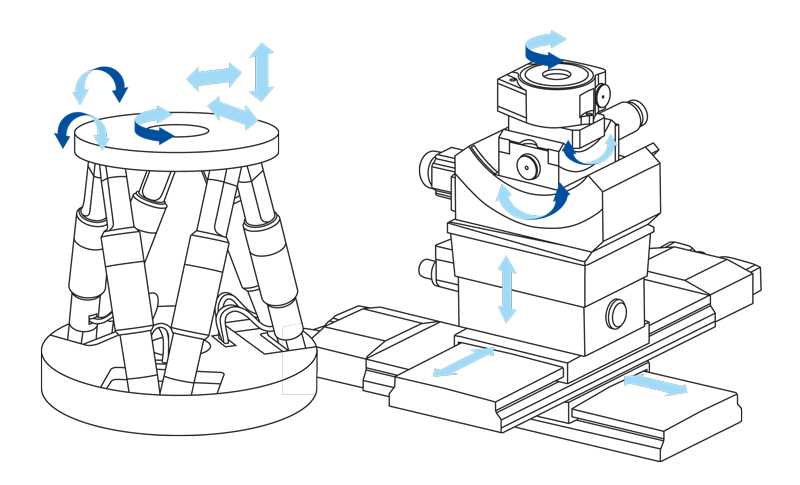
Bild: PI
Die Anforderungen an die zur Bewegungssimulation und -kompensation benötigten Systeme sind hoch: So müssen für die Simulation zu Test- und Prüfzwecken natürliche und künstliche Bewegungen präzise, wiederholbar und mit gleicher Dynamik und Genauigkeit in allen linearen und rotatorischen Achsen simuliert werden. Für die Kompensation definierter Bewegungen bzw. Bewegungsfehler gilt es dann hochpräzise Bahnkurven mit entsprechender Dynamik zu fahren. Alternativ dazu kann auch die Bewegung in Richtung der jeweiligen Achsen erfasst und sofort die Gegenbewegung kommandiert werden.
Gefordert sind in jedem Fall mehrachsige, dynamische Positioniersysteme, die mit einer Genauigkeit im Mikro- oder sogar Nanometerbereich arbeiten. Hier haben Hexapoden aufgrund ihres parallelkinematischen Aufbaus gleich aus mehreren Gründen die Nase vorn. Die Vorteile gegenüber seriellen, also gestapelten Systemen, sind vor allem die deutlich bessere Bahntreue, Wiederholgenauigkeit und Ablaufebenheit, die geringere bewegte Masse und damit eine höhere und für alle Bewegungsachsen gleiche Dynamik, kein Kabelmanagement und ein deutlich kompakterer Aufbau. Im Produktprogramm der Karlsruher Firma Physik Instrumente (PI) finden sich Hexapoden in einer Vielzahl unterschiedlicher Ausführungen, die sich für unterschiedliche Lasten eignen, mit unterschiedlichen Antriebsarten angeboten werden und für die verschiedensten Umgebungsbedingungen ausgelegt sind. Auch für anspruchsvolle Bewegungssimulations- und -kompensationssysteme lassen sich so maßgeschneiderte Lösungen realisieren.
Hochdynamisch und CIPA-zertifiziert

Bild: PI
Für die hochdynamische Simulation definierter Bewegungen kommen verschiedene Antriebsarten infrage. Hexapoden mit elektromagnetischen, bürstenlosen Torquemotoren und entsprechender mechanischer Auslegung des Antriebsstrangs und der Sensorik beispielsweise erreichen bereits Geschwindigkeiten bis 25 mm/s und Beschleunigungen bis 2 g. Perfekt auf die Belange der Prüfung von Bildstabilisierungssystemen ausgelegt und von der CIPA bereits zertifiziert, ist beispielsweise der Mini-Hexapod H-811. Er kann Schwingungen, z. B. rotatorische Bewegungen, mit einer Dynamik von 20 Hz über 0,1° Auslenkung simulieren. Dabei führt das Hexapod-System wiederholbar eine definierte Prüftrajektorie aus. Es bietet Stellwege bis 34 mm in der XY-Ebene und bis zu 13 mm in Z-Richtung. Die Kippwinkel betragen 20° um die X- und Y-Achse und bis zu 42° um die Senkrechte.
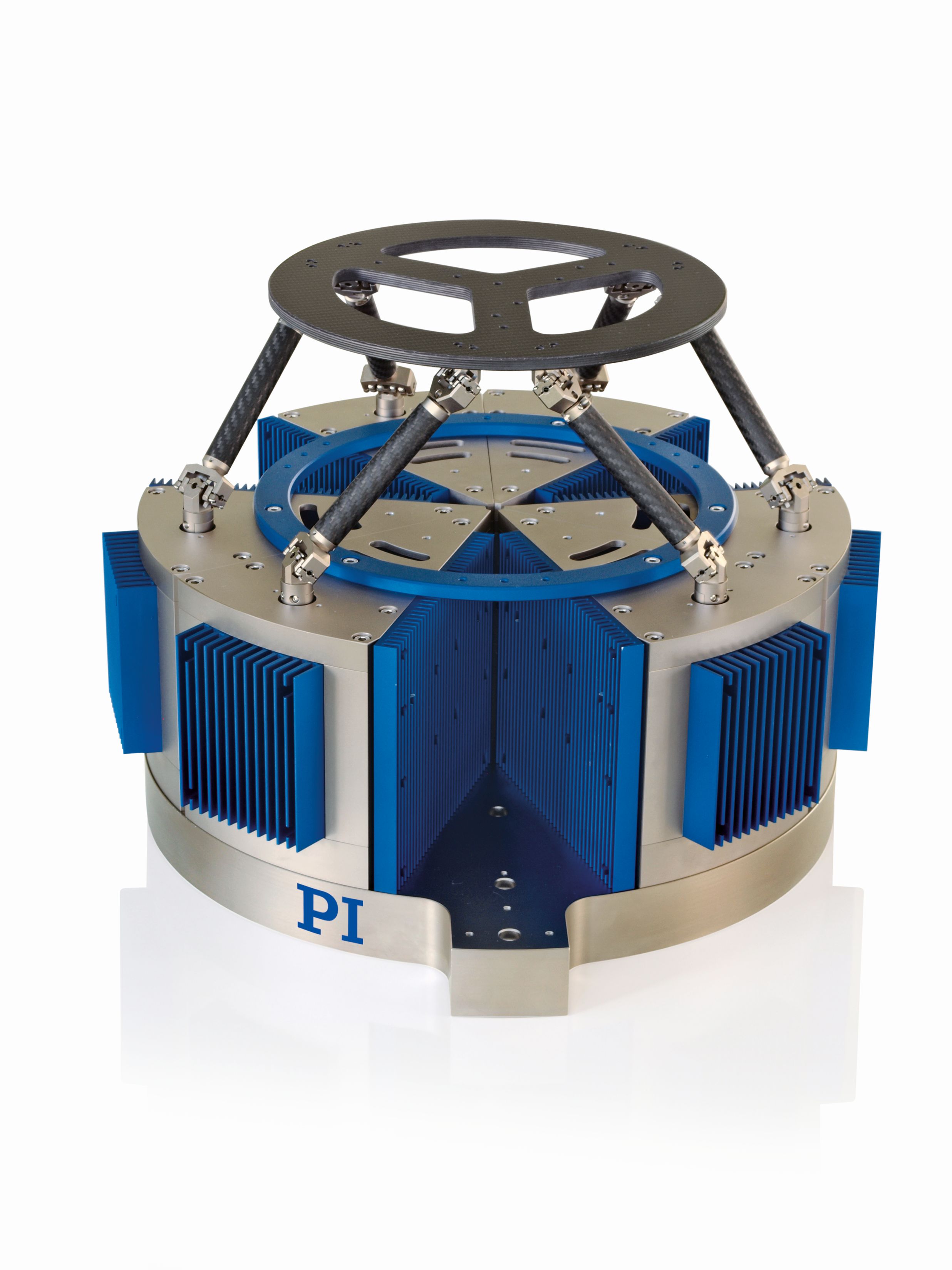
Bild: PI
Beste dynamische Eigenschaften erreichen auch Hexapoden mit magnetischen PIMag Direktantrieben; hier sind Geschwindigkeiten von mehreren Hundert mm/s und Beschleunigungen bis zu 4 g möglich. Das spezielle Design mit Festkörpergelenken verzichtet völlig auf rollende und reibende Elemente und ermöglicht dadurch eine spielfreie Bewegung ohne mechanisches Rauschen, unerwünschte Störfrequenzen aus der Hexapod-Mechanik beeinflussen also die Messung nicht. Automatisierte Testzyklen bei der Bewegungssimulation mit hohen Frequenzen lassen sich so mit großer Beschleunigung und Geschwindigkeit realisieren. Gleichzeitig ist ein präzises Folgen vorgegebener Trajektorien möglich.
Ein Hexapod dieser Klasse ist der H-860KMAG. Aufgrund der Leichtbauweise des Konzeptes, bestehend aus hochsteifen Carbon-Strukturteilen mit geringen bewegten Massen, lassen sich besonders schnelle und präzise Bewegungen und hohe Beschleunigungen realisieren. Das 6-Achsen-System bietet mit seinem parallelkinematischen Aufbau für sechs Freiheitsgrade der Bewegung ein präzises Abfahren vordefinierter Trajektorien, Sinuskurven und frei definierbarer Bahnen mit hoher Bahntreue. Dazu gehört ein leistungsstarker Digitalcontroller mit offener Softwarearchitektur und hexapodspezifischer Software. Typische Einsatzbereiche dieser hochdynamischen Hexapoden sind ebenfalls Tests von Bildstabilisierungsalgorithmen gemäß der CIPA-Standards. Außerdem sind sie prädestiniert für Simulationen von Schwingungen, z. B. im medizinischen Bereich das Simulieren von Augenbewegungen und die Blickerfassung bzw. Blickverfolgung sowie jeglicher Simulation von menschlichen und künstlichen Bewegungen. Schlagworte in diesem Zusammenhang sind die Augenheilkunde (Schielen) oder die Prothetik.
Hexapoden kompensieren Bewegungsfehler
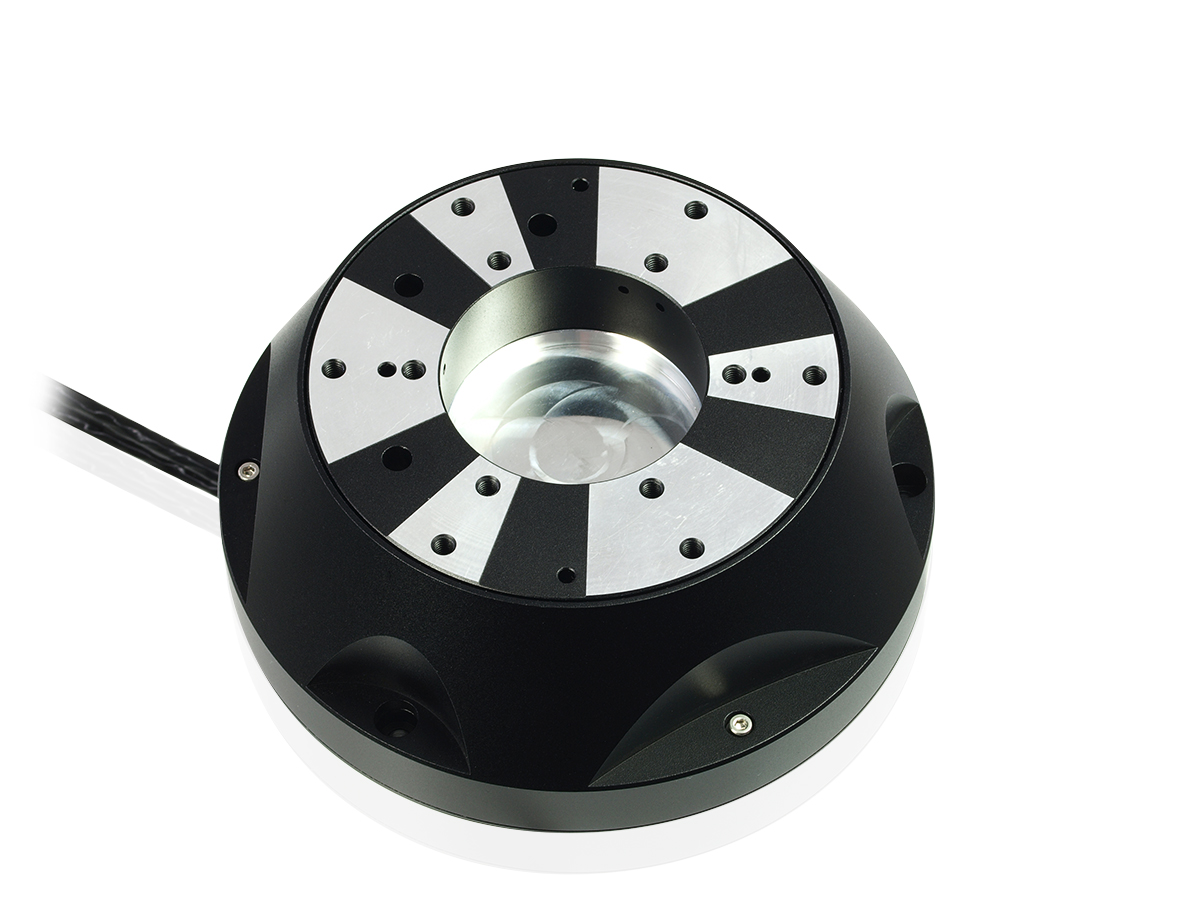
Bild: PI

Bild: PI
Wenn es bei der Kompensation definierter Bewegungen auf Nanometergenauigkeit ankommt, sind piezobasierte Hexapod-Systeme eine gute Wahl. Resonanzfrequenzen von 1 kHz ermöglichen eine schnelle Positionsregelung mit einer Wiederholgenauigkeit im Bereich von 1 nm. Der platzsparende, parallelkinematische Aufbau ermöglicht eine geringe Bauhöhe. Dadurch lässt sich der Hexapod gut in Maschinen integrieren, deren Führungsfehler oder Eigenbewegungen er kompensieren soll. Die Piezoantriebe arbeiten verschleißfrei, funktionieren auch unter starken magnetischen Feldern oder im Hochvakuum.
Die Ansteuerung übernehmen – ebenso wie bei den anderen Hexapod-Systemen – leistungsfähige Digitalcontroller, die dank einer bedienerfreundlichen Software eine einfache Kommandierung ermöglichen. Die Positionen werden in kartesischen Koordinaten vorgegeben; alle Transformationen auf die sechs Einzelantriebe finden im Controller statt. Eine wesentliche Eigenschaft ist dabei der frei definierbare Dreh- oder Pivotpunkt. Damit kann die Bewegung der Hexapod-Plattform gezielt auf die jeweilige Applikation abgestimmt und in den Gesamtprozess integriert werden. Sowohl bei der Simulation als auch bei Kompensation definierter Bewegungen werden die dynamischen und hochgenauen Hexapod-Systeme so zu unersetzlichen Helfern.
Titelbild: Image Engineering