Exakte Positionierung für Astronomie und Molekularforschung:DC-Kleinstmotoren als Hexapoden-Antrieb
Eine Million Kilometer von der Sonne entfernt ist es heißer als auf ihrer Oberfläche. Warum das so ist, wollen Forscher mithilfe zweier Satelliten klären, die ab 2017 die Sonne umkreisen werden. Für die präzise Positionierung der dazu notwendigen Messinstrumente sorgen Hexapoden. Angetrieben werden die präzisen parallelkinematischen Positioniersysteme von DC-Kleinstmotoren, die dann im Weltraumeinsatz ihre Leistungsfähigkeit beweisen können.
Bei einer Sonnenfinsternis kann man den Strahlenkranz um die verdunkelte Sonnenscheibe, die Korona, durch eine Schutzbrille mit bloßem Auge erkennen. Sie besteht aus nahezu vollständig ionisiertem Plasma und reicht bis zu drei Sonnenradien in den Weltraum hinaus. Mit einer Temperatur von mehreren Millionen Kelvin ist sie so heiß, dass die ca. 6.000 Kelvin der Sonnenoberfläche dagegen geradezu kühl wirken. Um der Ursache dieses enormen Gefälles auf die Spur zu kommen, plant nun ESA (European Space Agency) für 2017 in ihrem StarTiger-Programm den Start zweier Satelliten. Sie werden in einer speziellen Formation fliegen, denn entsprechende Messungen sind nur dann möglich, wenn die Sonnenscheibe abgedeckt ist und so die Korona nicht überstrahlt. Dabei darf aber der sonnennahe Teil des Strahlenkranzes nicht mit ausgeblendet sein. Die beiden Satelliten sind deshalb, wenn sie die Erde mit einer Geschwindigkeit von mehreren Kilometern pro Sekunde umkreisen, lediglich 150 m voneinander entfernt. Der Schild des einen Satelliten soll dann die Sonne so verdecken, dass die Instrumente auf dem anderen die Strahlung der Korona in bisher unerreichter Vollständigkeit einfangen können.
Bewegungsfreiheit in sechs Achsen

Bild: Symetrie
Um die beiden Satelliten und die Bordinstrumente optimal auszurichten, hat das StarTiger-Team die Raumflugsituation im Laboratoire d‘Astrophysique de Marseille nachgestellt. Der Koronagraph, der auf dem beschatteten Satelliten die Strahlung des Sonnenkranzes einfangen soll, wurde auf einem Hexapod montiert, dem Hochpräzisions-Modell BREVA von SYMETRIE. Solche Hexapod-Systeme basieren auf sechs hochauflösenden Aktoren, die auf eine gemeinsame Plattform wirken. Vom Prinzip her ist das die gleiche Arbeitsweise wie bei einem Flugsimulator, nur wesentlich genauer; statt von Hydraulikantrieben werden die Hexapoden von hochgenauen Antriebsspindeln und präzise ansteuerbaren DC-Motoren angetrieben. Durch die geringe Masse der bewegten Plattform sind die Einschwingzeiten beim Positionieren deutlich kürzer als bei konventionellen, gestapelten Mehrachssystemen. Der über Softwarefunktionen frei definierbare Drehpunkt bleibt unabhängig von der Bewegung erhalten, was bei der Justage der Messgeräte auf dem Satelliten wichtig ist.
Dank dieser Bewegungsfreiheit konnten die StarTiger-Techniker unterschiedliche Stellungen der Flugkörper zueinander simulieren. Der Hexapod zeichnet sich durch eine ganze Reihe von Eigenschaften aus, die ihn für diese Aufgabe prädestinieren, wie SYMETRIE-Geschäftsführer Olivier Lapierre erklärt: „Er bringt – bei geringsten Toleranzen – die geforderten Minimalbewegungen exakt hervor, ist aber zugleich extrem steif und kann deshalb die vorgegebene Stellung präzise halten.“ Sein Stellweg beträgt ±75 mm bzw. ±30 Grad, die Auflösung liegt bei 0,5 µm bzw. 2,5 µrad und die Reproduzierbarkeit wird mit ±1 µm bzw. 5 µrad angegeben.
Hohe Dynamik und Leistungsdichte

Bild: Faulhaber
Besonders wichtig dabei ist, dass sich die Antriebskomponenten gut in die Beine der Hexapoden integrieren lassen; d.h. möglichst kleine Baugrößen sind gefragt, die dennoch vergleichsweise große Leistungen liefern sollen. Um die hohe Positioniergenauigkeit zu erreichen, müssen die Antriebssysteme außerdem möglichst spielfrei arbeiten und das über die lange Betriebsdauer der Mikrostellsysteme. Gut erfüllen ließen sich alle diese Anforderungen durch DC-Kleinstmotoren mit eingebautem Encoder aus dem FAULHABER-Standard-Programm.
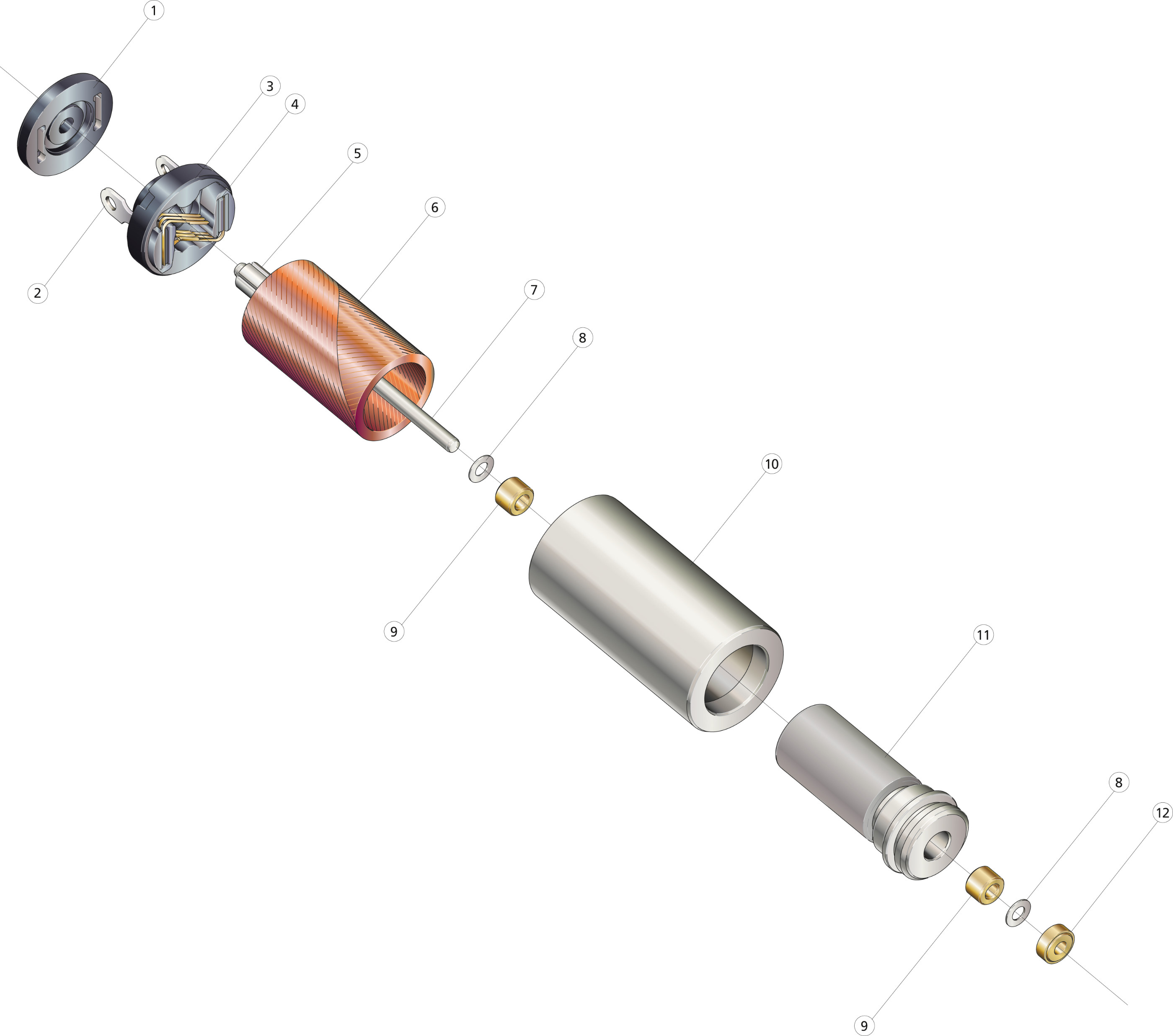
Bild: Faulhaber
Diese Antriebe verbinden die Vorteile der eisenlosen Wicklungstechnik mit denen der elektronischen Kommutierung. Sie sind auf der selbsttragenden Spulentechnologie (System FAULHABER) aufgebaut und bestehen im Wesentlichen aus einer dreiphasigen Wicklung und einem zweipoligen Permanentmagneten sowie dem elektronischen Kommutierungssystem. Zu den wichtigsten Eigenschaften dieses Prinzips gehören große Zuverlässigkeit sowie eine lange Lebensdauer. Dank der guten Dynamik, der großen Leistungsdichte aus kleinstem Bauraum und der hohen Encoderauflösung lassen sich mit ihrer Hilfe auch große Massen sicher und präzise positionieren.
Im Weltraum und in der Forschung zu Hause

Bild: Symetrie
Die Präzisionshexapoden, deren treibende Kraft die DC-Kleinstantriebe sind, werden auch bei anderen Weltraumprojekten genutzt, z.B. beim James-Webb-Raumteleskop, das ab 2018 das berühmte Hubble-Teleskop ersetzen soll, sowie beim GAIA-Satelliten zur Vermessung der Milchstraße. Dort werden sie zur Qualifizierung optischer Instrumente oder zur Montage optischer Einheiten eingesetzt. „Der Hexapod fixiert beispielsweise einen Spiegel in der vorgegebenen Position, bis der Klebstoff, der ihn dauerhaft halten wird, ausgehärtet ist“, beschreibt Lapierre eine typische Aufgabenstellung. Wie beim StarTiger kommt es auf eine extrem hohe Positioniergenauigkeit an: Das James-Webb-Teleskop soll theoretisch in der Lage sein, eine einzelne Kerze auf einem der Jupitermonde ausfindig zu machen.
Der für das GAIA-Projekt verwendete Hexapod wurde ursprünglich jedoch nicht für die Astronomie, sondern für die Material- und Molekularforschung entwickelt. Er entstand auf Grundlage einer spezifischen Anforderung der European Synchrotron Radiation Facility (ESRF) in Grenoble. Das Synchrotron in der Nähe der französischen Alpen erzeugt den stärksten Röntgenstrahl der Welt. „Unsere Hexapoden werden in der ESRF eingesetzt, um Richtspiegel und Proben in bestimmte Positionen zu bringen und dank ihrer ausgezeichneten Stabilität exakt zu halten“, erläutert Olivier Lapierre.

Bild: Symetrie
Ob sich der Blick in die Weiten des Alls oder in die Feinstrukturen der molekularen Ebene richtet, die wichtigsten Anforderungen an den Positionierhexapod sind immer dieselben: maximale Beweglichkeit und Genauigkeit bei höchster Stabilität. Je nach Anwendung können weitere Spezifikationen hinzukommen. Bei der ESA wie beim ESRF werden viele Arbeiten im Vakuum oder unter Reinraumbedingungen durchgeführt, denen die Geräte natürlich auch entsprechen müssen. Oft geht es auch sehr eng zu, und es werden Mini-Hexapoden benötigt. Die ideale Lösung für die Positionierung auf kleinstem Raum bietet das Modell BORA, der kleine Bruder des BREVA. Bei 212 mm Durchmesser seiner Standfläche ist er nur 145 mm hoch. Trotz dieser sehr kleinen Abmessungen kann er eine Last von bis zu 10 kg bewegen, und dies mit einer Auflösung von 0,1 µm auf den Richtungs- und von 2 µrad auf den Rotationsachsen. „Die FAULHABER Motoren spielen auch in diesen Hexapoden eine entscheidende Rolle“, erklärt Olivier Lapierre. „In der Kombination von Kompaktheit und Qualität sind sie für uns das Beste, was auf dem Markt zu haben ist.“
Titelbild: ESA