
Kommunikativer Antrieb für die IntralogistikAutonomes Fahren trifft Handling-Robotik
Hohe Löhne einerseits und der Fachkräftemangel andererseits treiben bei personalintensiven Tätigkeiten die Automatisierung voran. Das gilt auch für Logistik und Materialfluss. Ein Beispiel ist der Online-Handel. Gerade für den Abend oder fürs Wochenende, wenn viele Bestellungen eingehen, sind Mitarbeiter schwer zu finden. Selbstdenkende und selbststeuernde Lager gelten als eine sinnvolle Alternative. Sind sie aber noch immer Zukunftsvision oder mittlerweile realisierbar? Autonom fahrende und selbständig handelnde Logistikroboter bilden einen entscheidenden Baustein für eine „Intralogistik 4.0“. Ohne die passende Antriebstechnik „läuft“ aber auch hier gar nichts.
Die Münchner Magazino GmbH (Firmenkasten 1) entwickelt und baut wahrnehmungsgesteuerte, mobile Roboter für die Intralogistik. Mit ihrer Vision hat sich das junge Unternehmens Großes auf die Fahne geschrieben: das erste selbstdenkende und selbsthandelnde Warenlager der Welt zu schaffen. Das Unternehmen will die Entwicklung der Robotik vorantreiben und die Zukunft der Logistik aktiv mitgestalten. Eine Vision, die aufzugehen scheint. In den letzten vier Jahre ist das Start-up auf 80 Mitarbeiter angewachsen.
Pick-Roboter für stückgenauen Zugriff

Eine Entwicklung aus dem Hause der Münchner ist der Kommissionier-Roboter TORU, der den stückgenauen Zugriff auf einzelne Objekte ermöglicht. Der Roboter besteht aus einer mobilen Basis, einer ausfahr- und drehbaren Säule mit Greifsystem und einem herausnehmbaren Regal (Bild 1). Der adaptive Greifarm kann verschiedene quaderförmige Objekte greifen – von einem kleinen Taschenbuch über einen Schuhkarton bis zu einem schweren Lexikon. Anschließend lagert der Roboter das Objekt in seinem Regal und bringt es zur Versandstation. Mit Hilfe von Kameras, Sensorik, entsprechender Bildverarbeitung und künstlicher Intelligenz erfasst der Roboter seine Umwelt, interpretiert sie und trifft darauf basierend verschiedene Entscheidungen. Für seine Tätigkeiten kombiniert er also intelligent autonomes Fahren mit Handling-Robotik. Aktuell bewährt sich der Logistikroboter im Praxistest bei großen Versanddienstleistern.
Zur Unterstützung des Menschen
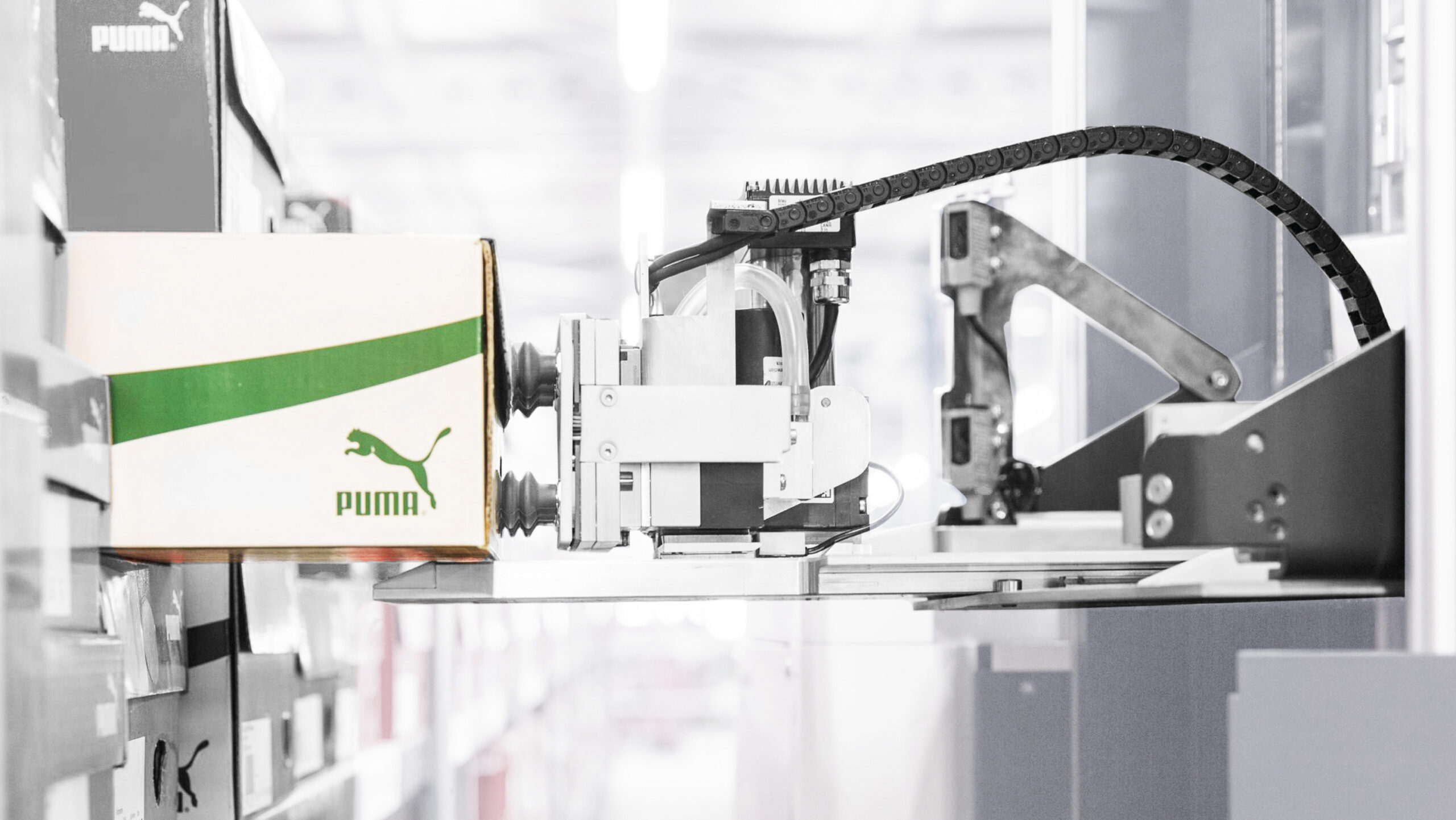
Seine Aufträge zum Auslagern von Produkten erhält der Roboter von einem übergeordneten Steuerungssystem in Form einer Lageradresse und eines Barcodes, der das Produkt exakt beschreibt. Daraufhin navigiert er selbständig an den Lagerort. Bevor der Roboter jedoch das Produkt aus dem Regal nimmt, prüft er, ob das überhaupt möglich ist. Dazu fährt er nah an das Zielfach heran, dreht die Hubsäule an seiner Vorderseite um 90 Grad zum Regal und ein Greifer fährt zum angegebenen Fach (Bild 2). Mit den eingebauten Kameras verschafft er sich ein Bild von der Situation. Florian Wahl, Pressesprecher von Magazino erläutert, wie es dann weiter geht: „Jetzt klärt TORU einige Fragen: Liegt im Regal überhaupt ein Produkt? Hat es den passenden Barcode? Bin ich in der Lage, das Produkt zu greifen oder würde sich dieses beim Herausziehen verklemmen, weil es vielleicht einige Zentimeter verschoben ist?“ Wurde z.B. ein Karton schräg ins Regal abgestellt und könnte sich beim Herausnehmen verkanten, erkennt TORU das und vermerkt es entsprechend im System. Dann muss ein Mitarbeiter diesen Kommissionierauftrag übernehmen. Im Normalfall jedoch entnimmt der Roboter das Paket dem Lagerregal und kann so über Nacht oder übers Wochenende einen Großteil der eingegangenen Bestellungen bereits für den Versand vorkommissionieren.
Bürstenlose DC-Servomotoren mit guter Überlastfähigkeit
Neben den eingesetzten Vision-Lösungen und der Roboter-Intelligenz ist natürlich auch zuverlässige Antriebstechnik gefragt. Hier wurden die innovativen Roboterbauer bei Faulhaber in Schönaich fündig. TORU setzt gleich bei mehreren Aufgaben auf Lösungen der Antriebsexperten. Die Pakete selbst werden mithilfe von Unterdruck aus dem Regal geholt. Um vor dem Ansaugen die Lücke zwischen Regalboden und dem Logistikroboter zu schließen und das Paket auf einer ebenen Fläche herausziehen zu können, wird eine Metallzunge ans Regal herangefahren. Diese Aufgabe übernimmt ein Antriebssystem bestehend aus bürstenlosem DC-Servomotor der Serie BX4, Motion-Controller und Planetengetriebe.
Auch für die Bewegung des Sauggreifers sorgen Antriebe des gleichen Typs (Bild 3). Zieht der Greifarm Produkte aus dem Regal, ist gerade zu Beginn das Losbrechmoment sehr hoch. Gefragt war also ein Antrieb mit hoher Leistungsdichte, der auch kurzzeitig ein sehr hohes Drehmoment bieten kann. Der eingesetzte, überlastfähige Antrieb liefert mit einer Leistung von 62 Watt im Dauerbetrieb Nennmomente bis 72 mNm, verkraftet aber auch kurzzeitige Spitzenmomente bis 99 mNm. Da beim Auslagern der Waren die Zeiträume der Überlastungen immer nur sehr kurz andauern und die Abstände dazwischen verhältnismäßig lang ausfallen, besteht nicht die Gefahr, dass der Antrieb überhitzt. Von einem geeigneten Antrieb war aber noch mehr gefordert:
Leicht und kompakt
Ein selbstfahrendes, akkubetriebenes Fahrzeug sollte natürlich möglichst leicht sein vor allem dann, wenn es auch auf filigranen Deckenkonstruktionen mit beschränkter Belastbarkeit unterwegs ist. So waren beim Logistikroboter auch Antriebe mit geringem Gewicht gefragt. Dass die Antriebseinheit bestehend aus Antrieb, Encoder und Motion Controller mit 305 g das auch tatsächlich ist, schlägt sogar gleich doppelt zu Buche: Ist der Arm zum Greifen der Ware ausgefahren, sitzt die Antriebseinheit weit oben in vertikal maximalem Abstand zum Roboterschwerpunkt. Bei diesem langen „Hebelarm“ würde ein schwerer Antrieb leichter dafür sorgen, dass der Roboter kippt. Er müsste also mit einem schwereren Roboterfuß als Gegengewicht ausgeglichen werden und so das Gesamtgewicht des Roboters gleich zweifach erhöhen. Durch die leichte Antriebseinheit kann jedoch auf das Gegengewicht verzichtet werden.
Kompakte Abmaße sind eine weitere typische Anforderung, die viele Anwendungen an eingesetzte Komponenten stellen. Mit einem Durchmesser von gerade einmal 32 mm und einer Länge von 85,4 mm punkten die bürstenlosen DC-Servomotoren auch hier. Damit ist es möglich, den Greifer sehr flach zu konstruieren, so dass er auch Pakete aufnehmen kann, die knapp über dem Boden gelagert sind. Teure Lagerfläche lässt sich dadurch optimal ausnutzen.
Kommunikativer Antrieb
Wenn ein intelligentes Gesamtsystem entstehen soll, reicht es aber nicht, dass einzelne Komponenten „clever“ sind. Sie müssen auch ihr „Wissen“ untereinander austauschen und zuverlässig miteinander kommunizieren. So sollten sich auch die eingesetzten Antriebe zuverlässig in den Automatisierungsverbund einbinden lassen. Raphael Vering, Entwicklung Maschinenbau bei Magazino ergänzt daher: „Dass die Antriebe eine CANopen-Kommunikation unterstützen, war für uns entscheidend.“
Von großem Vorteil war für die Münchner darüber hinaus, dass sie bei den Antriebsexperten eine passgenaue Motion Control Gesamtlösung fanden. Das verschaffte der Entwicklung Raum für die weitere Optimierung der neuen Logistiklösung. „Wir müssen keine Zeit in die Konzeption eigener Regler oder die Integration von Encodern stecken“ erläutert Vering. Die Motion Controller der Generation V2.5 bilden mit den DC-Servomotoren hochdynamische Positioniersysteme. Als Rückführung nutzen die Münchner die analogen Hallsensoren und sparen sich damit den Einsatz eines zusätzlichen Encoders. Die integrierte Stromregelung der Motion Controller begrenzt das Drehmoment und schützt Elektronik und Motor vor Überlast. Damit lassen sich sogar Störungen im Materialfluss erkennen: Wenn sich ein Produkt bei der Entnahme aus dem Regal verklemmt, steigt das Drehmoment und damit der Stromfluss im Motor erkennbar an. Der Motion Controller erkennt daran die Blockade, meldet sie an die Steuerung und stoppt den Vorgang. Am Beispiel des Logistikroboters wird wieder einmal deutlich, wie sich die kommunikativen Antriebskonzepte mit wenig Aufwand flexibel an die unterschiedlichsten Anwendungen anpassen lassen.